

計數追蹤算法的精準度:從“看得見”到“數得準”的技術核心
計數追蹤算法的精準度,是指在動態生產線上,系統不僅要對視野內的物體進行瞬時計數,更要能在物體移動過程中進行持續追蹤,確保每個物體只被計數一次,最終輸出接近100%準確結果的能力。
一、 影響精準度的四大核心挑戰
算法必須克服以下現實難題,才能實現高精度:
-
物體間干擾
-
粘連:兩個或多個物體接觸在一起,容易被誤判為一個。
-
重疊:物體在運動過程中發生部分或完全遮擋。
-
堆疊:在三維空間內上下堆積,底層物體被完全遮擋。
-
-
物體自身特性
-
形狀不規則:非標準的幾何形狀增加了輪廓識別的難度。
-
表面反光/吸光:如金屬件反光、黑色塑膠吸光,干擾特征提取。
-
顏色多變:同一條產線上需要處理不同顏色的產品。
-
-
環境與動態因素
-
運動模糊:物體高速移動時,相機捕捉的圖像會變模糊。
-
光照變化:環境光線的改變會影響圖像質量。
-
背景干擾:傳送帶紋理、顏色與產品相近。
-
-
追蹤丟失風險
-
物體運動軌跡出現劇烈變化(如彈跳、翻滾)。
-
兩個物體在運動中交叉、分離,導致身份標識(ID)丟失或混淆。
-
二、 提升精準度的關鍵技術(算法如何解決問題)
先進的計數追蹤算法通過以下技術組合拳來應對上述挑戰:
1. 多目標追蹤框架
-
核心思想:為視野內的每個目標分配一個獨立的ID,并在其運動過程中持續維護這個ID。
-
關鍵技術:
-
檢測:首先在每一幀圖像中精準地檢測出所有物體(常用YOLO、Faster R-CNN等模型)。
-
預測:使用卡爾曼濾波等算法,根據上一幀的位置和速度,預測每個物體在當前幀的預期位置。
-
關聯:將當前幀檢測到的物體與預測位置進行匹配(常用匈牙利算法),實現ID的延續。這是解決重復計數的關鍵。
-
2. 基于深度學習的實例分割
-
這是對抗“粘連”和“重疊”的終極武器。
-
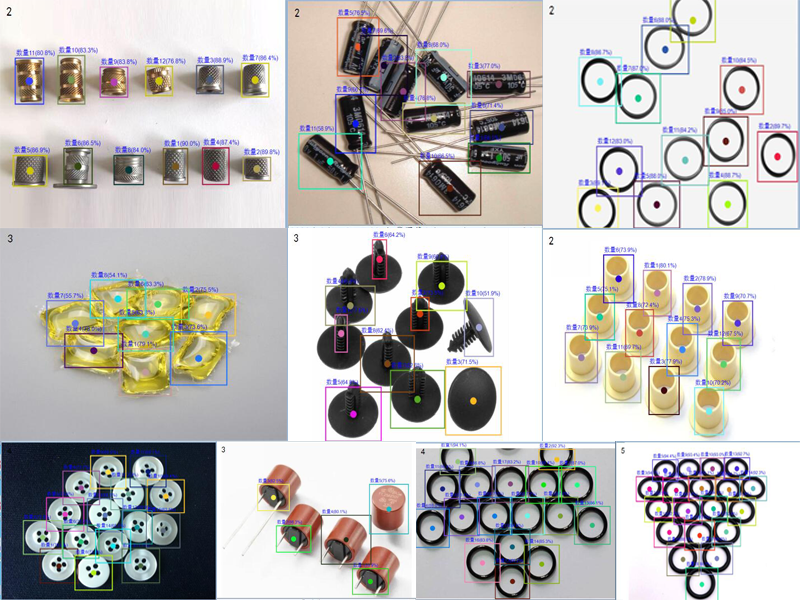
與邊界框檢測的區別:實例分割(如Mask R-CNN模型)不為物體畫框,而是為每個物體實例生成一個精確的像素級輪廓。
-
優勢:即使兩個物體緊密粘連,算法也能精確地勾勒出各自的邊緣,從而將其識別為兩個獨立的個體,極大提升了計數精度。
3. 重識別能力
-
當物體被短暫遮擋后重現時,算法能通過其外觀特征(如紋理、形狀、顏色)?將其與之前的ID重新關聯起來,避免將其誤判為一個新物體。
4. 自適應與優化策略
-
多相機協同:對于大范圍或復雜路徑,采用多個相機從不同角度捕捉,數據融合后得到更全面的追蹤信息。
-
軌跡分析與濾波:對物體的運動軌跡進行平滑處理,過濾掉不合理的跳躍點,提高追蹤穩定性。
三、 如何量化與評估精準度?
在實際應用中,我們使用以下指標來量化算法的精準度:
-
計數準確率
-
準確率 = (1 - |系統計數 - 真實數量| / 真實數量) * 100% -
行業領先水平:≥ 99.95%(即萬分之五的誤差)。
-
-
召回率與精確率
-
召回率:所有真實存在的物體,被系統成功識別出的比例。(漏檢率 = 1 - 召回率)
-
精確率:所有被系統識別出的物體中,是真實物體的比例。(誤檢率 = 1 - 精確率)
-
優秀的目標是同時實現高召回率和高精確率(均 > 99.9%)。
-
-
ID 切換次數
-
在追蹤過程中,同一個物體的ID發生變化的次數。次數越少,說明追蹤穩定性越好。
-
四、 給您的選型建議:如何驗證供應商的算法精度?
空口無憑,實證為據。在評估供應商時,請務必執行以下操作:
-
要求POC測試:提供您最具代表性、最難計數的產品樣品(如極易粘連的微小紐扣、異形件、高反光件)。
-
設定嚴苛測試場景:在測試中,故意制造大量粘連、堆疊、高速運行的極端情況。
-
親自核驗結果:用人工清點的方式,隨機抽取多組數據,與系統輸出結果進行嚴格比對,計算其真實準確率。
-
詢問技術細節:直接詢問供應商其算法是否采用了實例分割和多目標追蹤技術,這能快速區分技術實力的高低。
結論
計數追蹤算法的精準度,是視覺計數包裝機從“可用”到“好用”的分水嶺。它不再是一個簡單的圖像處理工具,而是一個融合了先進檢測、分割、預測與數據關聯的復雜智能系統。選擇擁有強大算法能力的供應商,意味著您獲得的不僅是一臺設備,更是一份對生產質量與效率的長期保障。







評論